Spring: L. Mehl, J. Schmalfuss, A. Jahedi, Y.
Nalivayko, A. Bruhn — University of Stuttgart
RobustSpring: V. Oei, J. Schmalfuss, L. Mehl, M.
Bartsch, S. Agnihotri, M. Keuper, A. Bulling, A. Bruhn — University of Stuttgart, University
of Mannheim, MPI for Informatics
Welcome to the Spring and RobustSpring datasets and evaluation benchmark for stereo, optical flow, and scene flow
estimation, including robustness evaluation under 20 realistic image corruptions!
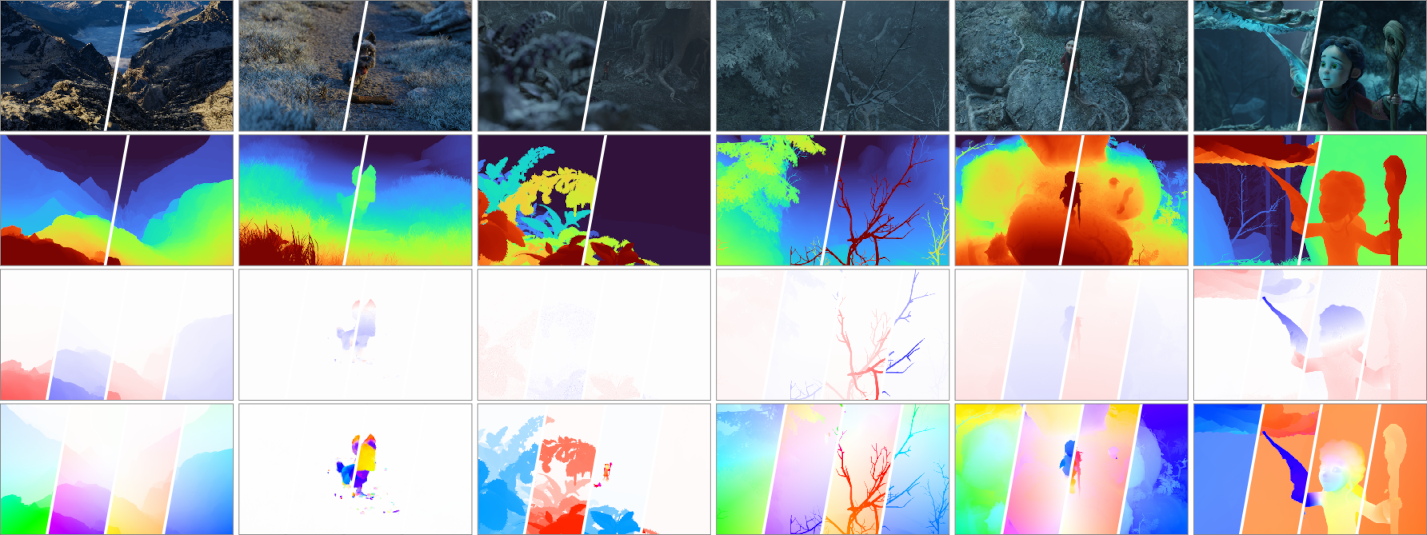
The Spring dataset consists of high-resolution left and right stereo images (1920×1080px). It also
contains full scene flow data with 4× super-resolution (3840×2160px). For stereo/depth estimation,
left-to-right and right-to-left disparity is given for every frame (see second row). For scene flow
estimation, the dataset provides disparity change for left and right as well as forward and backward
direction (see third row). For optical flow estimation, the Spring dataset contains left and right, forward
and backward optical flow (see last row).
RobustSpring is a novel image corruption benchmark for optical flow, scene flow and stereo. It evaluates 20
image corruptions including blurs, color changes, noises, quality degradations, and weather, applied to
stereo video data from Spring. For comprehensive robustness evaluations on all three tasks, RobustSpring's
image corruptions are integrated in time, stereo and depth where applicable.
May 15, 2025: We're excited to launch RobustSpring, a new robustness extension of the
Spring benchmark for stereo, optical flow, and scene flow. Download the dataset and start evaluating your models
under 20 realistic image corruptions: Get RobustSpring (DOI: 10.18419/DARUS-5047).
July 17, 2023: We corrected two erroneous train sequences: The forward right eye ground truth of sequences 0002
and 0020 now correctly contains forward flow instead of backward flow. Please make sure to download the latest
version of train_flow_FW_right.zip, train_disp2_FW_right.zip and
train_maps.zip. All other files and the test split data is unaffected. We thank Sander Gielisse for
notifying us!
June 20, 2023: We present our paper at CVPR 2023! Check out our video and poster.
March 20, 2023: Starting today we accept submissions of registered users. You can submit once per hour and up to
three times per 30 days.
March 14, 2023: Our full dataset is now available for download!
March 03, 2023: Hello world – our website is launched! We make a small sample available for download.
Paper
If you make use of our dataset or benchmark results, please cite our Spring and RobustSpring papers:
@inproceedings{mehl2023spring,
title={Spring: A High-Resolution High-Detail Dataset and Benchmark for Scene Flow, Optical Flow and Stereo},
author={Mehl, Lukas and Schmalfuss, Jenny and Jahedi, Azin and Nalivayko, Yaroslava and Bruhn, Andr{\'e}s},
booktitle={Proc. IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
pages={4981--4991},
year={2023}
}
@inproceedings{oei2026robustspring,
title={RobustSpring: Benchmarking Robustness to Image Corruptions for Optical Flow, Scene Flow and Stereo},
author={Oei, Victor and Schmalfuss, Jenny and Mehl, Lukas and Bartsch, Madlen and Agnihotri, Shashank and Keuper, Margret and Bulling, Andreas and Bruhn, Andres},
booktitle={Proc. International Conference on Learning Representations (ICLR)},
year={2026}
}